


Control System Trainer
Instrumentation & Control Didactic trainer

P, PI, PID CONTROLLER SIMULATIOR TRAINER
KCL-01
- Simulated blocks like dead time (transportation lag), integrator, time constant, error detector and gain.
- PID Controller Prop: Band 5% to 50% (Gain 2-20), Integral time: 10msec-100msec, Derivative time : 2-200msec
- Built-in signal sources Value of -1V to +1V, Square wave & Triangular of 1V p-p (min) at 40Hz, Built-in 3 ½ digit DVM for DC measurements
LINEAR SYSTEM SIMULATIOR TRAINER
KCL-02
- Simulated first, second and third order system of type-0 and type-1
- Calibrated variable gain amplifier (Resolution 1:1000)
- Built-in signal sources of Square wave and Triangular Frequency of 45-90Hz with Amplitude 0-2.5V.
- Uncommitted amplifier for phase adjustment, Provision for disturbance inputs.


POTENTIOMETRIC ERROR DETECTOR
KCL-03
- High quality servo-potentiometers of 360 degree shaft rotation.
- Built-in signal and power sources.
- 3½ digits DVM for measurements.
SYNCHRO TRANSMITTER & RECIEVER
KCL-04
- Synchro transmitter-receiver pair with calibrated dials enclosed In see through metal cabinet
- Locking system for receiver rotor, Receiver use as control transformer
- Built-in balanced demodulator circuit, Panel meter for ac/dc voltages


TEMPERATURE CONTROLLER TRAINER
KCL-05
- Temperature controller with facilities for P. I, D and relay control blocks.
- Operating temperature: Ambient to 900C.
- Separate controls for P, I, D channel gains, two settings for relay hysteresis.
- Fast 25W oven fitted with IC temperature sensor.
- Digital display of set and measured temperature on 3 ½ digit built-in DVM.
TEMPERATURE SENSOR TRAINER
KCL-06
- Study of 4 different temperature transducers - NTC thermistors, RTD Platinum, K (Cr-Al) thermocouples, IC temperature sensors.
- Study & comparison of Temperature transducer controlled alarm system
- PID control: P, P+I, P+D & P+I+D control action
- Instrumentation amplifier, adder amplifier : X1, X100, X235, P controller, I controller, D controller Comparator, Electronic switch, Signal conditioning, Rotary /Slide pots, Heater, Relay, Buzzer, LED
- Digital meter: Actual/Set temp/mV.


RELAY CONTROL SYSYTEM TRAINER
KCL-07
- Simulated electronic relay using high speed IC’s.
- Simulated 2nd order linear plant. Facility for displaying x and x’ signaling.
- Dead zone variable from 0-600mV, Hysteresis variable from 0-500m
- Built-in Signal source- Sine and Square Amplitude: 0-1V (min) with Variable Frequency: 10 to 1000Hz.
DC MOTOR SPEED CONTROL TRAINER
KCL-08
- Speed control of a 12V, 4W permanent magnet dc motor enclosed In see through Metal cabinet
- Speed range: 0 to 3000 rpm (typical), Opto-interrupter based speed sensing.
- 4-digit speed display in rpm, Electronic tacho generator for feedback.
- Separate unit for motor in a see-through cabinet, Smooth, non-contact eddy current brake for loading.
- Built-in 3 ½ digit DVM for signal measurements.


COMPENSATION DESIGN TRAINER
KCL-09
- Simulated ‘uncompensated’ system having adjustable damping. Peck percent overshoot Mp, variable from 20% to 50%, and steady state error variable from 50% to 0.5%
- Compensation network implementation through built-in variable gain amplifier. Gain is adjustable from 1 to 11.
- Built-in square and sine wave generators for transient and frequency response studies. Frequency adjustable from 25Hz – 800Hz (approx.).
STEPPER MOTOR STUDY TRAINER
KCL-10
- Single stepping and free running modes of operating with speed variation and direction reversal – internal TTL circuit.
- 360O motion Servo-Potentiometer position-pickup for motor dynamics.
- Operation through microprocessor kit-sample control programs provided.
- Stepper motor enclosed in see through metal cabinet, Torque 3 Kg-cm, Step angle 1.8 O, Power 12V, 1A/ phase.


DIGITAL CONTROL SYSTEM TRAINER
KCL-11
- Second order simulated process (analog process)
- Built-in D/A and A/D circuit (8-bit)
- 8085 based µP-kit as digital controller with user software in 8K EPROM.
- 16-bit arithmetic for algorithm calculations.
- Square wave test input (internal).
- 16 built-in levels of p. I and D gain each.
AC SERVOMOTOR STUDY TRAINER
KCL-12
- 2-phase a.c. servomotor – 12V/50Hz per phase enclosed in see through metal cabinet.
- Small generator for loading.
- 4-digit speed display, 3-digit time constant display.
- 3 ½ digit r.m.s. voltmeter, 3 ½ digit d.c. panel meter.


DC POSITION CONTROL TRAINER
KCL-13
- Position control of a 12V, 1A d.c. gear motor (50rpm) with calibrated dials coupled with tacho-generator enclosed in see through metal cabinet
- Provision for positive and negative tacho generator feedback.
- Tacho constant: 2V/ 1000 rpm approximately.
- Calibrated dials for reference and output position: resolution 1 degree
- µP based waveform capture card.
- Built-in 3 ½ digit DVM for signal measurements.
- Built-in step signal and IC regulated power supplies for electronic circuit.
- Servo-potentiometer with full 360 degree rotation.
- Separate unit for motor in a see-through cabinet.
AC POSITION CONTROL TRAINER
KCL-14
- 2-phase servomotor 12V/ phase, 50Hz, 10W with calibrated dials coupled with Potentiometer enclosed in see through metal cabinet.
- Power amplifier.
- Servo potentiometer type error detector.
- In-built 10.00V (rms) panel meter.
- µP based waveform capture card.


OPTICAL LIGHT INTENSITY TRAINER
KCL-15
- Light Sensor like Photoconductive Cell, Photovoltaic Cell, Phototransistor, PIN Photodiode
- On board Filament Lamp Light Source
- Signal Conditioning Circuitry : Power Amplifier, Current Amplifier, DC Amplifier, Comparator, Electronic Switch, Buffer
- On board Rotary, Slide Potentiometers, Relay & LED circuits provided.
DC SERVO LINEAR POSITION TRAINER
KCL-16
- Power Supply 2 Pole MCB, 6A with 9A Contactor & O/L thermal relay
- Power supply input voltage 1PH, AC 220V, 50Hz, Output DC 12V,5A
- Servo Amplifier Rated revolutions per minute (RPM): 18000rpm
- Metal Gearbox and Gears 900rpm base motor
- 0.2deg resolution Quadrature on output shaft
- Optical Encoder on output shaft
- Absolute (32bit) Motor position control interface
- Max-speed, Damping, P-Gain, I-Gain and Speed Feedback settings are adjustable
- Counts per Rotation 1800 counts
- Limit Switch 2 numbers
- Proximity Switch for Zero Position
- Motor Enable Relay
- Power Indicator
- Communication USB for computer interface
- Experiments:-Determination of the position, Setup of the position unit and parameter
- Characteristics of Servo Motor and setup of the Servo Driver, Speed, Position control operation


DC SERVOMOTOR STUDY TRAINER
KCL-17
- Speed control of a 30V/2A, permanent magnet d.c. motor coupled
- With tachogenerator enclosed in see through metal cabinet.
- Speed range: 0 to 2000 rpm (typical), Opto-interrupter based speed sensing.
- 4-digit speed display in rpm., Electronic tachogenerator for feedback.
- Separate unit for motor with 2Kg Spring Balance provided for loading.
- Built-in 3 ½ digit DVM for signal measurements, 3 ½ digit Current Meter.
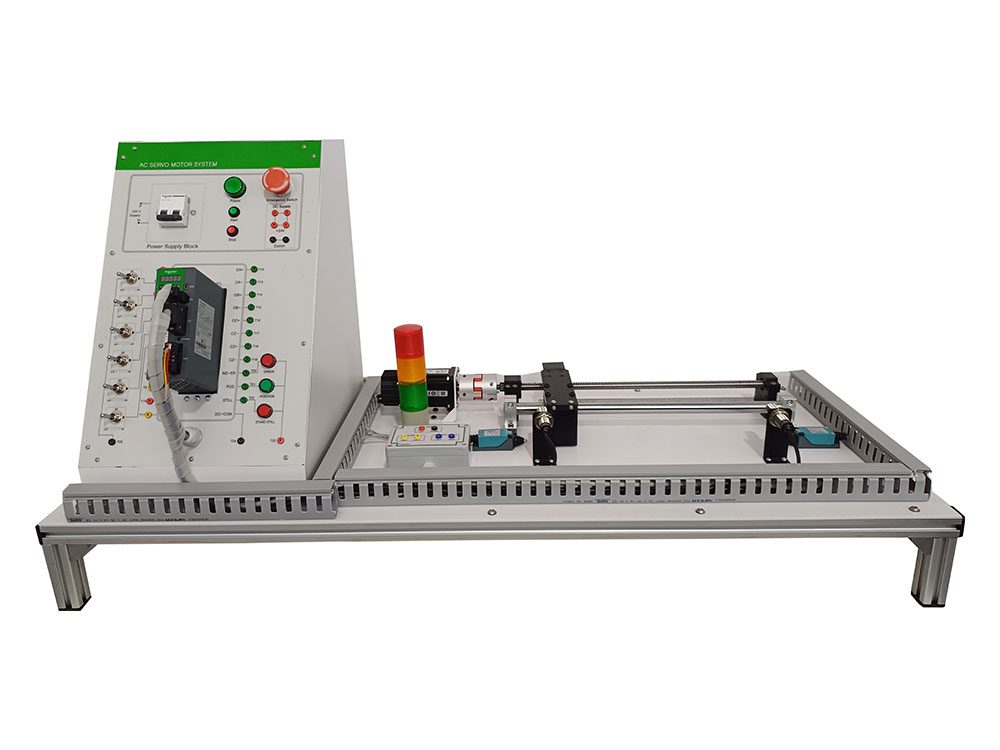
AC SERVO LINEAR POSITION TRAINER
KCL-19
- Power Supply 2 Pole MCB, 6A with 9A Contactor & O/L thermal relay
- Servo Amplifier Power supply 220V system
- Input Voltage 1Phase, AC 220V, 3.6A 50Hz
- Output 3Phase, AC 0~220V,0~400Hz,2.8A,400W
- Output: DC 24V/2A
- Rated revolutions per minute (RPM): 3000rpm
- Encoder type : 17-bit single-turn absolute
- Control signal 10 inputs, 4 outputs
- Analog Input Two 12-bit analog inputs
- Pulse signal
- Input 1 group (of open collector input or differential input)
- Output 1 group of differential outputs (A+/A-; B+/B-; Z+/Z-)
- Encoder 2 Input Incremental encoder (or grating ruler) interface
- Communication USB for computer interface
- Control mode Position control ,Speed control ,Torque control
- AC Servo Motor 220V AC, 1.8A, 400W, 1.3Nm, 3000rpm
- Experiments
- Determination of the position, Setup of the position unit and parameter, Characteristics of Servo Motor and setup of the Servo Driver
- Speed, Torque and Position control operation
INVERTER TRAINER
KCL-20
- 2 Pole MCB, 6A with 9A Contactor & O/L thermal relay Inverter
- Power supply 220V System Input Voltage 1Ph, AC 220V, 2.2A 50Hz
- Output 3Phase, AC 0~220V,0~50Hz,1.6A,0.25HP
- Output : +24V DC, 10V DC
- Digital Input : 5 Input
- Digital Output : 1 Relay NO,NC Output
- Analog Input : 2 Input, 0-10V/0-20mA
- Analog Output : 2 Output, 0-10V/0-20mA
- Control Method : Voltage /Frequency
- Output Frequency : 0.2~50Hz
- Voltage/Frequency : Baseband 0~50Hz
- Starting Torque : 150%(at 3Hz), 200%(at 0.5Hz)
- Speed control 1:50 configurable
- Frequency Setting: 0-10V/ 4-20mA
- Capacity(W) : 180W
- Input Voltage : 1-phase AC 200V~240V 50/60Hz
- Protection against overvoltage, overcurrent, overheating, Phase Loss.
- AC Motor-3 Phase 220V AC, 300mA, 180W, 1440RPM